Stanford Pratical Machine Learning-神经网络
本文最后更新于:1 年前
这一章主要介绍多层感知机
MLP
Handcrafted Features -> Learned Features
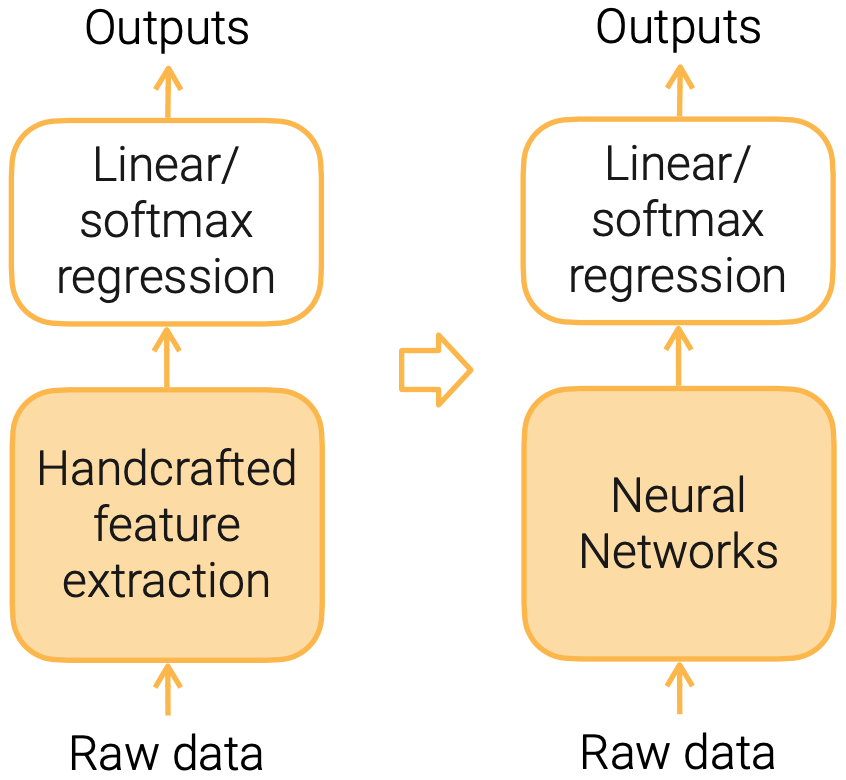
- NN usually requires more data and more computation
- NN architectures to model data structures
- Multilayer perceptions
- Convolutional neural networks
- Recurrent neural networks
- Attention mechanism
- Design NN to incorporate prior knowledge about the data
Linear Methods -> Multilayer Perceptron (MLP)
A dense (fully connected, or linear) layer has parameters,$w\ and\ b$, it computes output $y = wx + b$
Linear regression: dense layer with 1 output
Softmax regression:
- dense layer with m outputs + softmax
Multilayer Perceptron (MLP)
- Activation is a elemental-wise non-linear function
- sigmoid and ReLU
- It leads to non-linear models
- Stack multiple hidden layers (dense + activation) to get deeper models
- Hyper-parameters: # hidden layers, # outputs of each hidden layer
- Universal approximation theorem
Inputs -> Dense -> Activation -> Dense -> Activation -> Dense -> Outputs
Code
- MLP with 1 hidden layer
- Hyperparameter: num_hiddens
1 | |
CNN
Dense layer -> Convolution layer
Learn ImageNet (300x300 images with 1K classes) by a MLP with a single hidden layer with 10K outputs
- It leads to 1 billion learnable parameters, that’s too big!
- Fully connected: an output is a weighted sum over all inputs
Recognize objects in images
- Translation invariance: similar output no matter where the object is
- Locality: pixels are more related to near neighbors
Build the prior knowledge into the model structure
- Achieve same model capacity with less # params
Convolution layer
- Locality: an output is computed from $k \times k$ input windows
- Translation invariant: outputs use the same $k \times k$ weights (kernel)
- # model params of a conv layer does not depend on input/output sizes -> n × m → k × k
- A kernel may learn to identify a pattern
Code
- Convolution with matrix input and matrix output (single channel)
- code fragment:
1 | |
Full code: http://d2l.ai/chapter_convolutionalneural-networks/conv-layer.html
Exercise: implement multi-channel input / output convolution
Pooling Layer
池化层(汇聚层),减少对于像素级别便宜的敏感
- Convolution is sensitive to location
- A translation/rotation of a pattern in the input results similar changes of a pattern in the output
- A pooling layer computes mean/max in windows of size k × k
- code fragment:
1 | |
Convolutional Neural Networks (CNN)
- Stacking convolution layers to extract features
- Activation is applied after each convolution layer
- Using pooling to reduce location sensitivity
- Modern CNNs are deep neural network with various hyper-parameters and layer connections (AlexNet, VGG, Inceptions, ResNet, MobileNet)
Inputs -> Conv -> Pooling -> Conv -> Pooling -> Dense -> Outputs
RNN
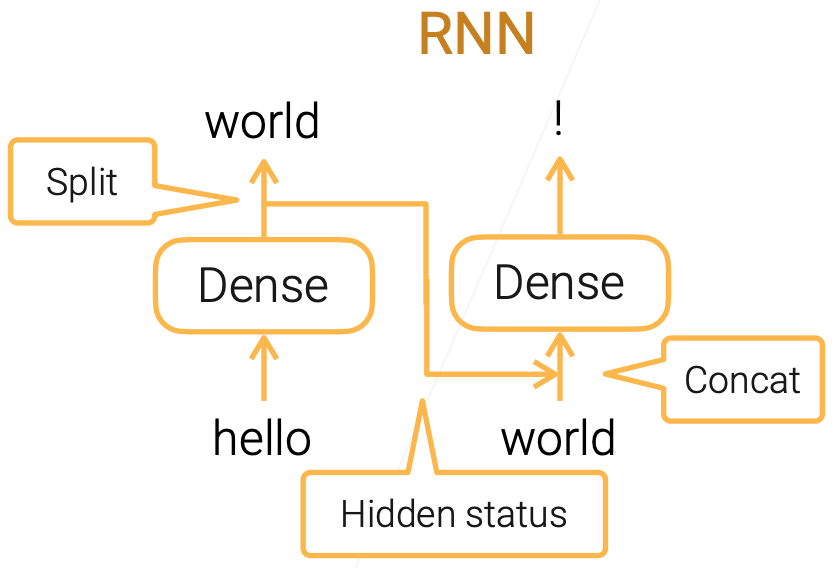
Dense layer -> Recurrent networks
- Language model: predict the next word
- Use MLP naively doesn’t handle sequence info well:
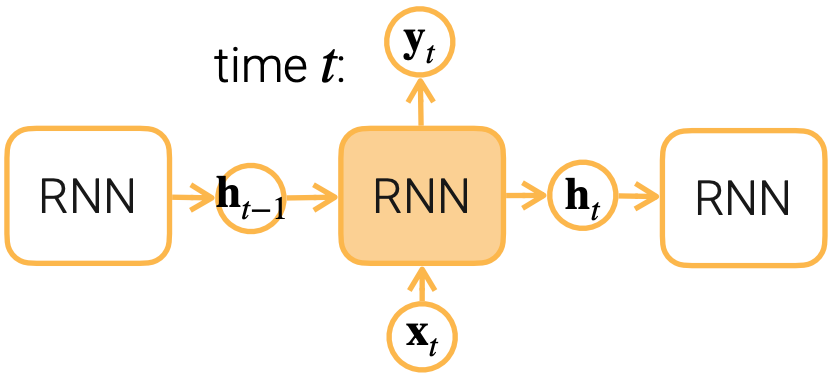
RNN and Gated RNN
- Simple RNN
- Gated RNN (LSTM, GRU): finer control of information flow
- Forget input: suppress $x_t$ when computing $h_t$
- Forget past: suppress $h_{t-1}$ when computing $x_t$
Code
- Implement Simple RNN, code fragment:
1 | |
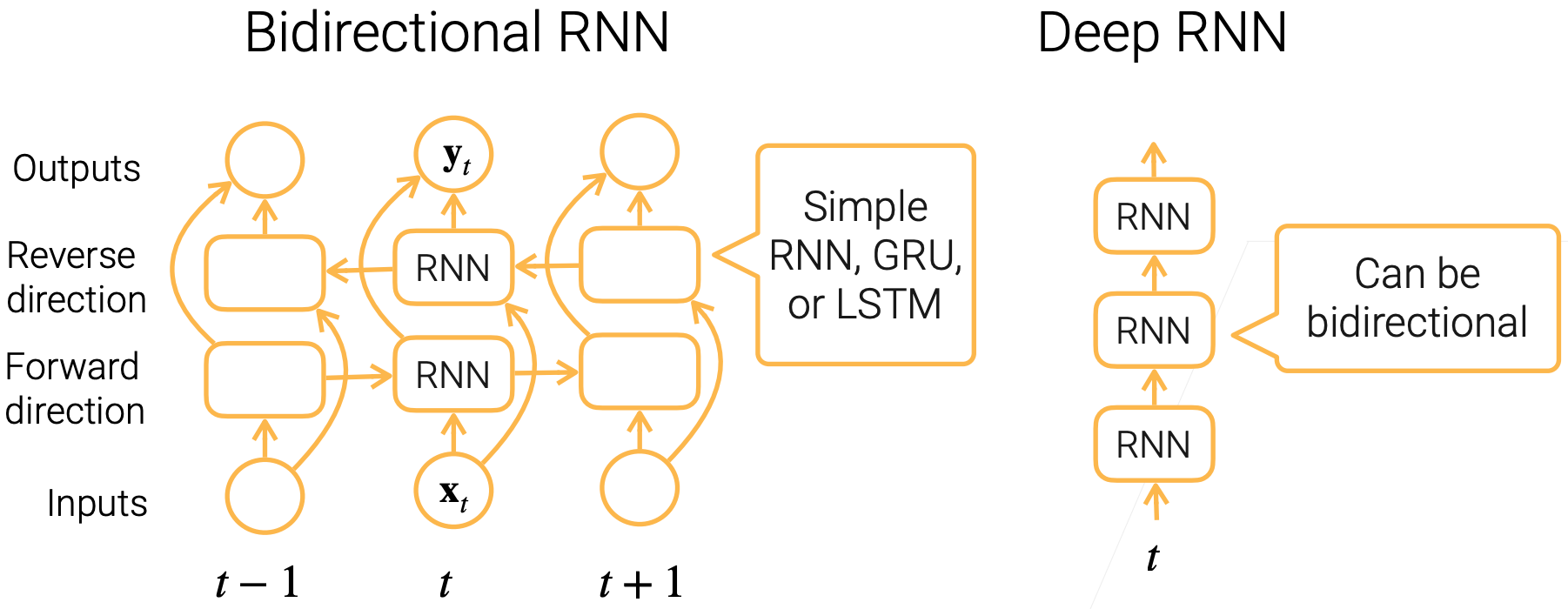
Bi-RNN and Deep RNN
Model Selections
- Tabular
- Trees
- Linear/MLP
- Text / speech
- RNNs
- Transformers
- Images / audio / video
- CNNs
- Transformers
Summary
- MLP: stack dense layers with non-linear activations
- CNN: stack convolution activation and pooling layers to efficient extract spatial information
- RNN: stack recurrent layers to pass temporal information through hidden state